henry 发自凹非寺
量子位 | 公众号 QbitAI
刚刚,风头被中国机器人盖过的波士顿动力,又整了个大活!

前后空翻我还能理解,这侧空翻?(不是哥们,你真会啊!)
那再来三个后空翻呢?

直接连翻三个,蓄力、弹跳、旋转、落地、缓冲、调整一气呵成。

穿了轮滑鞋照样能翻,帅不帅你就说吧!
然而,负责 Spot 的工程师 Arun Kumar 却淡淡地表示:
“Spot 并不是专为空翻设计的,其实在开始之前,我们甚至没想过它能后空翻。”
天啊,快看看这个家伙。

Spot,不止杂耍
有一说一,Arun Kumar 还真没有凡尔赛。
除了前后侧空翻,作为一只合格的机器狗,Spot 还真有点东西在身上。
负重爬楼。

勘测扫描。

就连开个门也是“顺手的事”。

毫无疑问,机器狗真正的用途是上面这些实打实的任务。
就连 Arun 老哥也表示,客户可能不需要专门买一条机器狗来看它后空翻(doge)。
那么,为什么要训练机器狗来做空翻呢?
这里的逻辑是这样的:
在真实作业环境里,Spot 可能滑倒、被障碍绊住,人类不可能每次都亲自去扶它。
所以,为了让机器狗能在摔倒的时候更容易地爬起来,就需要开发一个能充分利用硬件和动力的系统。
因此,像空翻这种看似花哨的动作,实际上是最严苛的测试手段
能做到连翻三下,就证明系统硬件强、算法稳、子系统协同也牛
由此一来,机器狗在真实环境作业也更加有保障。
另外,Arun Kumar 还透露了 Spot 训练的一些细节:
他们先在仿真环境中进行强化学习,一旦策略出现问题,那么他们就将其部署在真机上进行测试,观察问题,然后反复测试迭代,加强 Spot 的稳定性。
(注:可参考论文 High-Performance Reinforcement Learning on Spot: Optimizing Simulation Parameters with Distributional Measures)
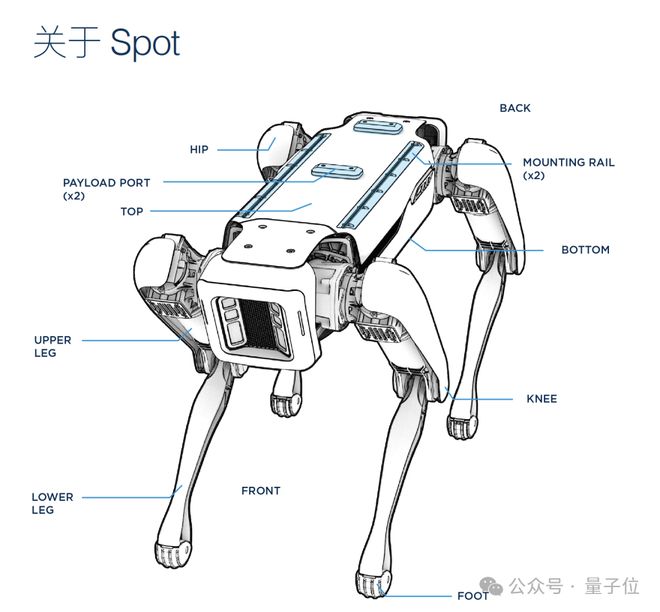
此外,作为波士顿动力的小型四足机器人:
Spot 高 84cm,长 110cm,宽 50cm,净重 32.5kg,全身共 12 个自由度(每条腿 3 个),并配有 5 对立体摄像机。
One more thing
值得一提的是,Spot 这次的空翻不光是为了测试硬件和动力系统,同时也是为了上《美国达人秀》做准备。

作为 2016 年就“出生”的机器狗,Spot 早已成名多年。
早在 2018 年,波士顿动力还没上市之前,Spot 就已经跳起了火星哥的《Uptown Funk》。

而在 2020 年,Spot 更是加入“机器人群”,来了个人狗共舞。

同年,Spot 更是随着防弹少年团的歌整了个“七狗观音”。
(值得一提的是,在 2020 年 12 月,韩国现代集团收购了波士顿动力 80% 的股份,并于 2021 年 6 月实现全部控股)

所以,对 Spot 来说,舞蹈和娱乐一直都是它的训练场,你说是吧?
[1]https://x.com/BostonDynamics/status/1960700538665721871
[2]https://rai-inst.com/resources/papers/high-performance-reinforcement-learning-on-spot/






