
新智元报道
编辑:编辑部 HYZ
刚刚结束 Pre-A 轮融资,穹彻智能再次完成数亿元 Pre-A+ 轮融资!至此,穹彻智能在短短半年内,已经完成两轮数亿元融资。该轮融资由红杉中国领投。
最近,具身智能领域的明星初创公司穹彻智能,宣布完成新一轮融资。
可靠信息显示,该轮融资由红杉中国领投。除红杉中国外,本轮融资的投资方还包括 Prosperity7 Ventures、璞跃中国、小苗朗程等。
穹彻智能成立于 2023 年 11 月,由深耕通用智能机器人领域近十年的非夕科技集团战略孵化。目前成立仅一年时间,穹彻智能已完成三轮融资,累计融资金额达数亿元人民币。资方囊括红杉中国、Prosperity7 Ventures、广发信德、小苗朗程、泽羽资本、创新工场、奇绩创坛、璞跃中国(Plug and Play China)、MFund 魔量资本等知名创投基金。
在大模型风靡的 2024 年,如果说 AI 领域还有哪些热点,「具身智能」必定位列其中。全国具身智能领域赛道火热,为何明星基金齐聚穹彻智能?
从下面的 demo 中,我们可以窥见一二。
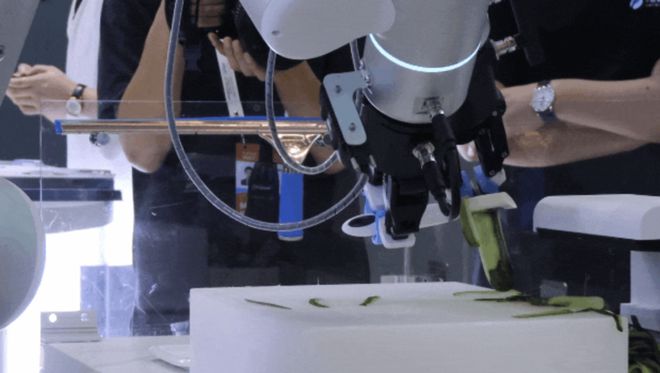
WAIC 世界人工智能大会期间,穹彻在完全开放的环境中向现场观众近距离展示了「随手一扔就能叠的衣物折叠」(无限自由度物体操作,复杂物体理解堪比人类)和「削完就能吃的黄瓜削皮」(不规则曲面操作,精细度甚至超越人类水平)等突破性技术,以及家庭地面整理等落地应用。
通过这些实时演示和真实互动,穹彻具身大脑的通用性和鲁棒性得以全方位展现。
在技术模式上,穹彻与海外具身智能初创公司 Physical Intelligence、Skild 目标一致,主攻具身智能大模型,在国际上处于领先地位。卢策吾主导开发的穹彻具身大脑,在多项技术指标上达到世界领先地位,并成功实现商业落地。
或许技术上的前瞻视野和商业化的更早落地,也是 Prosperity7 Ventures、红杉中国等国际顶级投资公司看好穹彻的原因之一。
值得一提的是,据 The Information 报道,Physical Intelligence 已告知投资者希望以约 20 亿美元的估值筹集 3 亿美元。此前已经以约 4 亿美元的估值从 Khosla Ventures、Lux Capital、红杉资本、Thrive Capital 和 OpenAI 等知名投资机构筹集 7000 万美元。
具身智能这一前沿技术已成为各家投资公司追捧的热点,穹彻未来的发展值得期待。
穹彻为何获红杉中国青睐?
红杉中国一直高度重视前沿科技和人工智能相关领域的投资与布局,积累了丰富的投资经验。
红杉董事总经理公元认为:「现阶段机器人基础模型领域的创业,需要公司有一个科学家团队,能定义和评估各个点上的关键问题。穹彻智能创始人卢策吾是国内具身领域最资深的科学家,同时在非夕 8 年来经历了机器人产业化落地,团队拥有该领域最接近系统级的综合能力。」
Noematrix Brain 穹彻具身大脑
具身智能是 AI 的下一波浪潮,是一种智能系统或机器能够通过感知和交互与环境进行实时互动的能力。它们通过近似人类的方式,利用视觉、听觉、语言和触觉等多种感知手段来收集信息。
在与真实世界的互动中,这些智能体能够通过感知环境、执行控制操作以及自我学习的过程来不断积累经验和技能。
基于此,穹彻智能提出了独特的技术路线和战略选择——「以力为中心」的具身大脑系统,通过快速迭代通用技能,实现高效且低成本的解决方案。
在成立初期,穹彻智能便正式发布了自研的穹彻具身大脑 Noematrix Brain,该系统以通用性和智能化为核心设计,可提供一套全面的、集成软硬件的平台和工具,覆盖了智能体应用从研发、测试到部署和验证的完整生命周期。
穹彻智能认为,Noematrix Brain 穹彻具身大脑聚焦在非结构化、开放场景、多任务下的机器人智能边界的突破,与各种类型的机器人本体、工业设备都能有机结合,包括但不限于工业机器人、人形机器人、服务型机器人、智能家居设备等等。

穹彻智能 Noematrix Brain 技术框架
通常认为具身智能有 3 个模块——具身感知(Perception)、具身想象(Imagination)和具身执行(Execution)。常见的具身智能架构主要基于视觉语言大模型进行环境和任务的表征学习与推理,并通过模仿学习或强化学习实现基于轨迹位置的决策优化。
而穹彻智能依托于力控技术方面的深厚积累,通过将力的多维模态和控制策略引入学习空间,构建了一个基于物理常识和行为决策的具身智能模型框架体系。
其中,实体世界大模型通过面向操作的拓扑结构常识理解、以操作任务为中心的物理常识理解,以及 pose-shape 联合训练框架,具有准确率高、训练成本低的优势,同时解决了柔性物体操作的难题。
而机器人行为大模型则可以做到以力和操作对象为中心坍缩训练空间,让穹彻具身大脑以极高的训练效率学会「如何决策」,且具有极佳的鲁棒性和安全性。
以两个大模型为基础,穹彻具身大脑得以具备规划、记忆、执行这三种核心能力。在先前机器之心的访谈中,卢教授亲自尝试了「全球首例机器人刮胡子服务」,其演示全程生动呈现了这三种能力的交叉和融合。

考虑到「力觉」在机器人与物理环境互动中的关键作用,穹彻智能所推出的力-位混合的机器人行为大模型,实现了全面的力-位混合决策控制,具备训练信息完备、高可迁移性、高精度、高鲁棒性等优势。
实体世界大模型以任务为中心,抽象提取操作物理常识的表征,从而显著缩小训练空间;机器人行为大模型则以力和对象为中心,进一步塌缩训练空间。这种两级架构的联合训练方式不仅显著降低了数据需求,还提高了实际应用的可行性。
穹彻具身大脑目前已初步建立包括数据采集、模型训练、部署验证全流程的一整套产品体系。其中具身大脑获得单场景百套订单的突破,并在多个复杂元技能的端到端训练上,兼顾泛化性和落地性能的双重要求,实现了机器人真机应用能力边界的实质性突破。
AnySkill:技术到市场的加速转化
为卢策吾教授刮胡子的机器人还被赋予了通用物体表面刮削技能(AnyShave)。
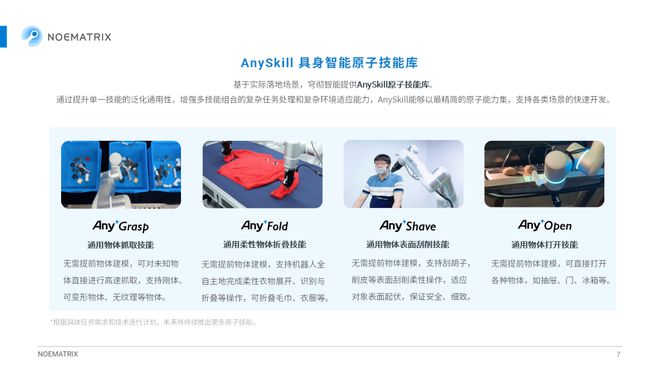
基于穹彻具身大脑,穹彻提供持续扩展的机器人原子技能库 AnySkill,从而使智能体具备广泛的通用操作能力。
通过不断提升单一技能的泛化通用性和可靠性,AnySkill 能增强多技能组合在处理复杂任务及适应复杂环境的能力。凭借最精简的原子技能库,AnySkill 支持各类应用场景的快速开发与部署。
AnyShave 同样可以用于黄瓜削皮、折叠抹布等应用场景中
基于每个原子技能强大的泛化迁移能力,穹彻曾经展示 AnyShave 的另一个有趣应用——给黄瓜精细削皮,并熟练折叠抹布,用抹布擦拭工作台。
无需提前建模,AnyShave 可以根据黄瓜表面状况自主判断最优刮削轨迹、用刃方向、适宜速度和力度,并自适应其受力下实时弯曲变化的曲面,操作如人一般精细,甚至某些时候超过人类。
穹彻智能作为在开放环境下进行全任务过程真机演示的具身智能厂商,展现了其具身大脑系统在地面清洁、桌面整理、柔性物体操作(如叠衣服)和食材处理(如削黄瓜)等多种任务中的卓越性能。
穹彻智能团队通过 AnySkill 通用技能系列产品的应用和商业探索,已初步验证了渐进式的技术发展到商业化的路径能够形成可持续的正向循环。这一验证不仅证明了技术的实际效果,还展示了持续发展的潜力。
此外,穹彻智能依托一支学术底蕴深厚的研发团队,持续在前沿领域深耕细作,与顶尖学术机构紧密合作,推动技术不断革新。
近期,穹彻智能与上海交通大学卢策吾和刘景全团队携手合作,深刻认识到分布式触觉技术对于重建完整人类操作至关重要,当操作被遮挡时,触觉可以作为视觉的有效补充,从而一同还原出操作区域的形变状态、接触力位点和大小。
因此,该团队提出了一种全新的视觉-触觉联合记录和追踪系统 ViTaM(为 Visual-Tactile recording and tracking system for Manipulation 的缩写),包括一个可伸缩的触觉手套,与一个基于视觉-触觉的联合学习框架。文章在 24 个物体样本中进行实验,涵盖了 6 个类别,包含刚性物体和可形变物体,重建误差均值仅为 1.8 厘米。

ViTaM 技术系统在未来发展的商业价值在于,对于刚体和可形变物体,系统都能进行高水准的重建,也同时适用于不同类型的物体,如纸杯,橡皮泥,剪刀等日常生活中常见的物体。此外,ViTaM 有望被深度集成至机器人的电子皮肤之中,从而赋予机器人与周围环境进行无缝互动的能力。
这不仅能够使机器人实时感知并精准响应多样化的环境刺激,更将极大提升其在复杂场景下的灵巧操作水平,推动智能机器人技术迈向更加先进和实用的新阶段。
随着技术的不断进步和商业应用的不断扩展,穹彻 AnySkills 将在更多领域发挥作用,推动具身智能技术的广泛应用。
当前阶段,穹彻将在零售运营、物流拣选、食材处理、家庭服务和科研教育等领域充分探索,打磨核心应用技能。
核心团队
穹彻智能所开发的技术,离不开创始团队在 AI 和机器人领域拥有深厚的学术积累和丰富的行业经验。
公开资料显示,穹彻智能成立于 2023 年 11 月,由两位斯坦福校友王世全和卢策吾联合创办,致力于研发具身智能系统及其相关工具与平台。
联合创始人王世全,于浙江大学机械电子系及竺可桢学院毕业后,便赶赴斯坦福大学仿生与灵巧操作实验室(BDML)及人工智能实验室(机器人方向)攻读博士学位,师从 Mark Cutkosky 教授(斯坦福大学设计研究中心主任、仿生机器人奠基人)和 Oussama Khatib 教授(国际机器人研究基金会主席,力控人形技术机器人奠基人)。
王世全在 IJRR、T-RO、Science 子刊等顶级期刊和会议上发表了超过 20 篇论文,并拥有数十项专利。读博期间,他主攻研究柔性灵巧手设计、仿真建模及控制、传感器设计与融合算法、驱动器设计,以及深度学习在机器人上的应用,研究机器人种类涵盖四足、人形、移动、水下机器人。他的主要研究项目之一,人形攀岩机器人的相关研究成果,在国际顶级机器人会议 IROS 上荣获最佳论文奖。
王世全于 2016 年发起创立非夕科技,开创了基于极致力控和层级式智能的仿人化通用机器人技术路径。其自适应机器人产品已在工业制造、食品加工及医疗服务等多个行业广泛应用,在近百项应用中突破了机器人能力的边界。延续在通用机器人本体 AI 技术融合方面的长期积累,王世全将继续推进穹彻力中心行为大模型相关技术的研发布局。
联合创始人卢策吾的经历及学术地位,同样「不遑多让」。2015 年 2 月,卢策吾赴斯坦福大学人工智能实验室开展博士后研究,导师为李飞飞教授和 Leonidas J. Guibas 教授(美国工程院院士)。2016 年,卢策吾选择回国发展,现担任上海交通大学教授。同时,他还是具身智能领域唯一的科学探索奖获得者、并入选麻省理工科技评论的 MIT TR35 榜单、以及荣获吴文俊自然科学一等奖。
卢策吾及团队已在《自然》、《自然-机器智能》、TPAMI、T-RO 等顶级期刊上发表了超过 100 篇高质量论文,并原创提出了 AnyGrasp 抓取算法,实现了超越人类水平的首次突破。另外,其团队的 RH20T 数据集为第一个大规模包括力觉信息的大规模具身数据集,卢策吾也是国内唯一获邀加入 Open X Embodiment Dataset 国际联合具身智能大规模数据集项目的中国学者。
核心管理团队吸引了前人形机器人企业负责人、华为业务高管等拥有深厚行业背景经验的人才加入,并迅速汇聚了一批在学术、工程、商业等方面都有顶尖能力的优秀人才,团队对于技术研究、产品开发及商业应用均有自己深刻独到的认知和理解。






