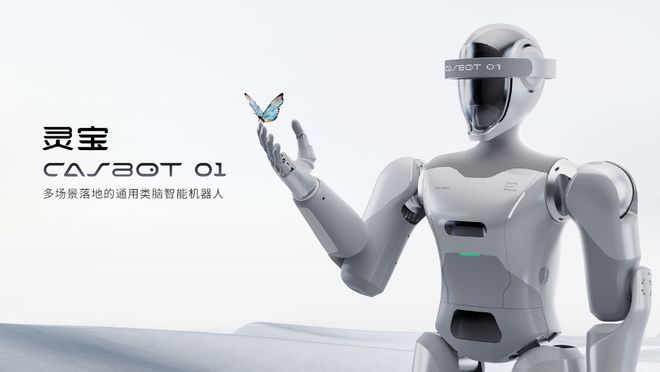
人形机器人品牌灵宝 CASBOT 正式发布首款全尺寸双足人形机器人“CASBOT 01”,一款多场景落地的通用类脑智能机器人。

这是灵宝 CASBOT 在成立不到 1 年的时间内交出的一份亮眼的答卷,也标志着人形机器人赛道迎来一位极具快速商业化能力的新入局者。
成立至今,灵宝 CASBOT 已在航天航海、应急救援、井下作业、工业制造和商业服务等多个领域积累了众多合作伙伴,并探索出具身智能商业应用的新场景。
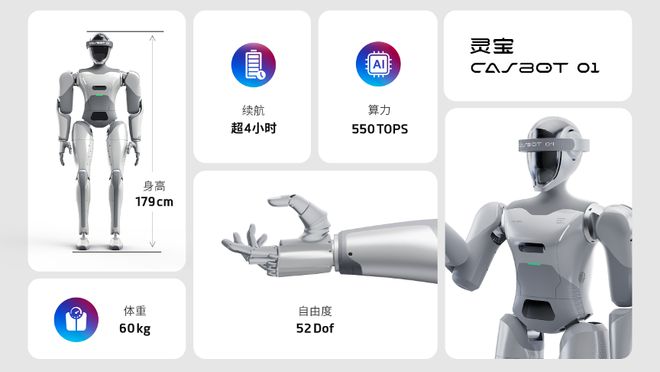
“CASBOT 01”,身高 179cm,体重 60kg,整机拥有 52 个自由度,算力达 550T,续航时间超过 4 小时。
它还有个更好记的昵称叫做“星期三”,通过友好的外观设计,使其与人更有亲近感。从灵宝发布的产品片中可以看到,“星期三”不仅可以双足站立及稳定行走,并且还能够整理衣物、组装台灯、更换灯泡、甚至打螺丝。
在 ID 设计上,CASBOT 01 通过对人体肌肉比例的视觉化分解及抽象化的概括提炼,实现了机械工程和有机美学的完美融合。
在机械结构设计部分,经过多次优化,灵宝 CASBOT 平衡了运动范围和造型美观度。在整机极致减重的情况下,采用了高强度金属材料加工复杂曲面,形成了中间加固的超薄空心腔体,保证了结构的稳定性和抗冲击性。
灵宝 CASBOT 自主研发了包括行星、谐波,以及直线三大系列一体化关节,峰值扭矩密度最高可达 207Nm/kg,关节效率超 80%。关节使用基于电流或传感器的力控优化策略,辅以模型跟踪控制,采用振动抑制、惯量辨识、摩擦补偿及“增益自整定"等技术,实现高精度的"力矩环”控制效果,根据运控整体需求进行惯量匹配,提高单关节动态响应频率:高效稳定的通信,满足高动态力控带宽需求:通过冲击工况优化能源管理策略,结合伺服、单腿及整机过流等保护措施,完成了近千小时的寿命测试,确保关节的长时间稳定运行。
本体的卓越结构性能,为机器人的运动控制训练提供了坚实底座。
CASBOT 01 的整体运动控制框架结合了对抗运动先验和全身控制(WBC),实现了运动的一体化控制。通过这一框架,机器人能够在复杂动态环境中稳健地执行全身作业任务。在传统强化学习训练框架的基础上,灵宝 CASBOT 同步训练了生成对抗模仿学习网络、生成器和判别器不断进行博弈,使得模型会生成高度拟人的运动控制策略。
得益于丰富完整的数据库,可以根据任务内容展现出多种不同的运动能力,如行走,跑步,跳跃等,从而高效的完成指定任务,大大提高了模型的通用性。
“大脑”层面,在评估业内主流的“端到端具身大模型、分段决策模型以及示教模仿训练技能模型”后,灵宝 CASBOT 选择了分层端到端模型技术路线,能够结合各种路线的优势,同时规避它们的不足。
在模型训练方面,灵宝 CASBOT 采用了从实到虚、数据合成、混合训练、再从虚到实的创新技术路线。通过分层端到端模型和混合训练技术,能够让机器人更加智能、灵活和自主。
当“本体”和“大脑”紧密协作,机器人便获得了高层认识、理解和决策规划的能力。
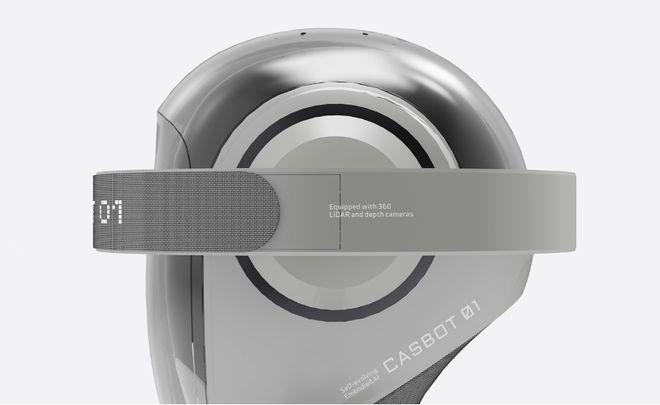
CASBOT 01 的头部具有两个自由度,配备了多个 RGBD 相机、激光雷达和 IMU 等传感器,能够进行视觉和听觉的双重交互,在操作框架下,通过端到端多模态灵巧操作大模型、蒸馏与量化技术等,成功实现机器人手部对“环境、对象、任务”的泛化和适应能力。
作为完成精细操作的末端执行器,CASBOT 01 的五指仿生灵巧手单手重量为 800g,额定负载 5 公斤,采用了高紧凑度整机构型及驱-传-感-控系统一体化的仿生设计,以及触觉-力觉-视觉的多源感知系统设计方案,通过优化控制算法和动作规划,模仿人手在操作中的灵活性,面向精细化作业场景,力求解决“灵巧”和“作业”两方面的难点。在软件、硬件的强力支撑下,实现了可快速学习、可泛化的长时序灵巧操作。

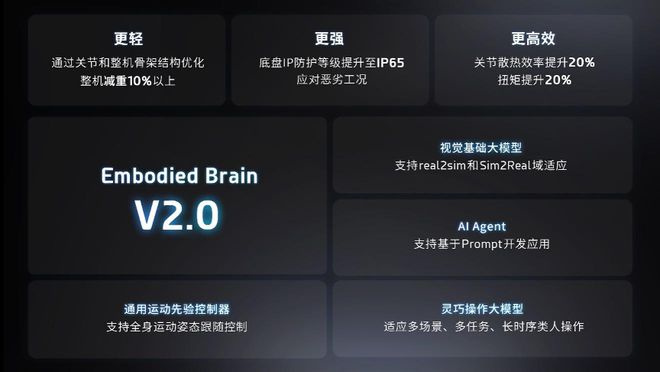
发布会上,CASBOT 01 还代替主持人发布了“ONE MORE THING”——“CASBOT NEXT GEN”,作为 CASBOT 01 的升级版。
它将搭载 Embodied Brain 2.0、视觉基础大模型 2.0,以及升级版通用运动先验控制器,和灵巧操作大模型,可完成全身运动姿态跟随控制和人类操作视频数据混合训练,实现运动操作双向提升。