新智元报道
编辑:LRST
香港中文大学等机构的研究团队通过深度强化学习(DQN)开发了一种 3D 打印路径规划器,有效提升了打印效率和精度,为智能制造开辟了新途径。
随着 3D 打印技术的迅速发展,如何在复杂的几何图形上生成高效且精确的打印路径,已成为制约其广泛应用的关键挑战之一。
近日,曼彻斯特大学、波士顿大学和香港中文大学的研究团队在 SIGGRAPH Aisa 2024 联合提出了一种创新的、基于深度强化学习(DQN)的路径规划器,能够在多种不同结构的图形上生成优化的 3D 打印路径,显著提升了打印过程的效率和精度。
论文链接:https://arxiv.org/pdf/2408.09198
项目链接:https://rl-toolpath-planner.github.io/
在 3D 打印中,路径规划问题可以看作是在给定图形上的节点序列中找到最优路径。这一问题的复杂性不仅在于不同模型的图形结构各异,还在于图形中的节点和边数量庞大。
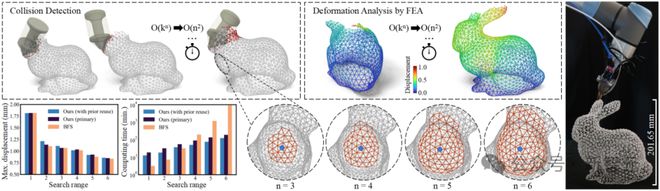
传统的方法,例如暴力搜索和启发式算法,通常由于计算复杂度高,难以在较短时间内给出全局最优解,而该研究提出的 DQN 优化策略,通过动态构建局部搜索图(LSG)并在其中进行路径选择,大大降低了计算复杂度,使得在处理包含成千上万个节点的图形时也能实现实时路径规划。
方法创新与技术突破
该路径规划器的核心创新点在于其灵活性与适应性。研究团队通过设计精巧的算法,将局部搜索图编码为状态空间,使得在相似配置下,先前学习的 DQN 策略可以被重新利用,进一步加快路径规划的计算速度。
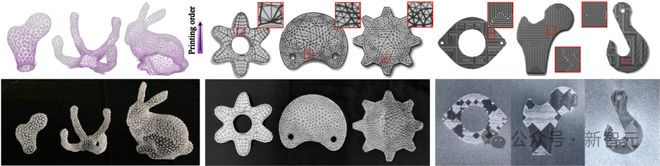
该规划器可以通过定义不同的奖励函数,适应多种 3D 打印应用场景,包括线框结构打印、连续纤维打印以及金属粉床熔融打印。
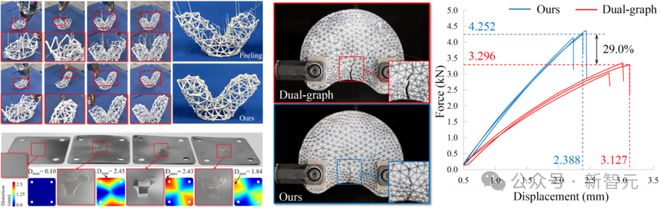
在物理实验中,该规划器展示出了卓越的性能。在线框结构打印中,研究人员成功实现了包含多达 4200 根支柱的模型打印,且变形控制在 1 毫米以内。
在连续纤维打印中,该方法能够有效避免 93% 以上的锐角转弯,极大地提高了打印质量;而在金属打印中,通过优化路径规划,热变形减少了近 25%,显著提升了打印件的精度和稳定性。
技术细节
在该研究中,研究团队通过多样化的图形路径规划来应对不同的 3D 打印挑战,提出了一种灵活的强化学习策略。在具体实施中,他们使用深度Q网络(DQN)作为优化器,来决定下一个要访问的最佳节点。
这种策略通过构建局部搜索图,并利用历史数据加速计算,大幅提高了路径规划的效率。为了进一步提升模型的性能,研究人员设计了一种算法,可以识别相似配置下的局部搜索图,从而使之前学习到的 DQN 策略可以重复利用。这种技术不仅加快了路径计算速度,还使得该方法能够在多种 3D 打印应用中灵活应用。
实验验证与广泛应用
为了验证该方法的实际效果,研究团队进行了多种模型的物理实验,涵盖了从简单几何到复杂结构的多种图形类型。实验结果表明,无论是线框结构、连续纤维还是金属打印,该路径规划器都能够生成符合制造要求的最优路径,且显著缩短了计算时间。
例如,在一项实验中,使用该规划器生成一个复杂线框模型的路径规划总耗时仅为 2.05 小时,而打印整个模型的时间为 6.67 小时。相比之下,传统暴力搜索方法即使只在局部搜索范围内执行,也需要数百小时的计算时间。
研究团队还指出,这种基于学习的方法为未来的 3D 打印技术开辟了新的可能性。通过引入强化学习,路径规划不再仅仅依赖于预先设定的规则或启发式算法,而是可以根据实际打印情况进行自我调整和优化。这不仅提高了打印的成功率,还减少了材料浪费和打印失败的风险。
前景展望
这项研究的成功标志着 3D 打印路径规划领域的一个重要里程碑。基于深度学习的路径规划器不仅为复杂几何结构的打印提供了高效解决方案,也为未来智能制造系统的开发奠定了基础。
研究团队计划在未来进一步扩展该方法的应用范围,包括探索其在多材料打印、微尺度打印等领域的潜力。此外,通过结合更先进的机器学习模型与优化算法,研究人员希望能进一步提高路径规划的效率和精度,为工业生产和科研应用提供更强大的技术支持。
总体而言,基于学习的多样化图形路径规划器在 3D 打印中的应用,为解决复杂制造问题提供了全新的思路与工具,未来有望在智能制造、航空航天、医疗器械等高精尖领域发挥重要作用。
参考资料:






