
车东西(公众号:chedongxi)
作者 | 迩言 Janson SR64
编辑 | 志豪
理想再次站上擂台,冲击中国智驾第一梯队。
车东西 7 月 5 日消息,就在刚刚,理想汽车举办了智能驾驶夏季发布会。
理想方面官宣,全国都能开的无图 NOA 将于 7 月内向理想 AD Max 全量用户推送,同时 7 月内推送全自动 AES(自动紧急转向)和全方位低速 AEB(自动紧急制动)。
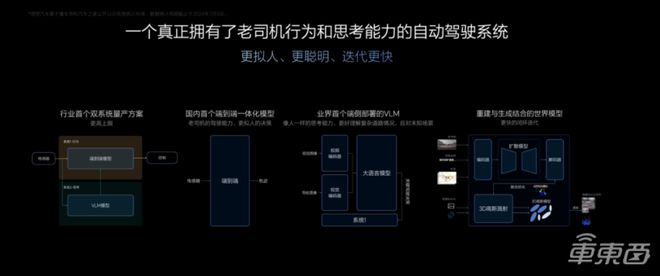
同时,理想还发布基于端到端模型、VLM(视觉语言模型)和世界模型的全新自动驾驶技术架构,开启端到端 +VLM 的早鸟计划。
▲理想介绍自动驾驶系统最新成果
本次理想智能驾驶夏季发布会可以说是干货满满,技术口的专业解读还给观众带来了一些理解门槛。
值得注意的是,理想智能驾驶夏季发布会,李想本人并未出席,在技术讲解方面,则是通过三位技术专家的谈话的方式呈现的。
发布会结束后一个小时,理想汽车美股开盘股价微跌近3%,报 20 美元/股(约合人民币 145 元/股),市值为 213 亿美元(约合人民币 1548 亿元)。
目前,华为、小鹏已经推送了全国都能开的无图城区高阶驾驶辅助功能,蔚来也推送了全域领航辅助 NOP+ 城区功能。
虽然李想并未出席本次发布会,但在 6 月 8 号的 2024 中国汽车重庆论坛现场,李想就对业内高调放话。
李想称,理想汽车将在今年第三季度推出全国都能开的无图 NOA,并向测试用户推出经过 300 万 clips 训练的端到端 +VLM(视觉语言模型)监督型自动驾驶系统。
他还表示,最早今年年底,最晚明年年初就会全量推送有监督的 L3 级别自动驾驶,三年内一定实现 L4 无监督的自动驾驶。
可以说,李想以及理想汽车对于智能驾驶的规划非常明确,他没有用“争取”来描述,而是把话说的非常满,从字面意思上基本没有回旋的余地。
这也说明了,理想正瞄准自动驾驶技术端口全力出击,脚步逐渐提速。
一、看齐华为“哪里都能开” 理想拿出无图端到端大招
在今晚的发布会上,理想汽车拿出了其最新的 OTA6.0 更新,这次升级不仅拿出了真无图的 NOA 系统,扩展了系统的功能范围,还在多方面提升了自动驾驶体验和安全性。
此次更新将适配给理想全部 AD MAX 用户。

▲理想全系车型
在城市 NOA 方面,理想重点介绍了全新的无图 NOA 系统在城市智能驾驶方面做出了显著改进。
新的无图 NOA 系统在设计中充分考虑了用户的心理安全需求,通过将仅依赖视觉的 Occupancy Network 升级为集成了 Lidar 与视觉的前融合技术,实现了对更广泛区域内不规则障碍物的精准识别,显著提升了感知的精确度。
这样的技术升级不仅增强了车辆在可行驶区域内的安全性和行驶连续性,而且实现了分米级的精细操控。这一改进使得用户与车辆之间建立了一种更加默契和信赖的关系。
首先,它突破了城市范围、道路等级和车道线清晰度的限制,实现了“全国都能开,能导航的地方都可以使用”的目标。这意味着,无论车辆行驶在何处,只要导航系统覆盖,NOA 都能提供支持。
这也是理想继通勤 NOA 之后,第一次拿出了全程可用的无图 NOA 方案。
同时,新系统采用了全新的时空规划算法,使整体决策更加果断。
在具体的形式模式上,无图 NOA 新增的蠕行博弈能力和根据车流方向选路的能力,使得系统在复杂交通环境中表现得更加灵活和智能。

▲路口转弯博弈绕行能力
以复杂路口为例,通过导航数据的先验信息进行决策是此前智驾技术的普遍选择。
理想在此次 OTA 后运用 BEV 算法的感知能力一系列技术复合决策,将摄像头拼接的周边环境、道路信息、导航提供的轨迹和数据信息全部合并在一起,形成超视距能力,在通过路口的时候找到最优路线,不再过多依赖“先验”信息。

▲超宽错位车道选路能力
同时,NOA 激活时的超车变道策略也得到了优化,避免激活时立即发起超车变道,提升了驾驶的安全感。
此外,在无图 NOA 绕行过程的流畅度也有所提升,加减速与转向的配合更加协调,绕行更果断、更拟人。横、纵向控制的统一性得以提高,转向、加速和制动反应更加灵敏。

▲窄车道借空间避让来车能力
与此同时,在复杂天气下,无图 NOA 系统也可以进行自主决策,一定程度给车主提供支持。
除了决策能力外,在驾驶模式上,新版无图 NOA 系统的行驶体验更拟人化,兼顾了舒适和安全。
新的智驾系统在红绿灯起步提速和制动时机的优化,也使得加减速过程更加自然拟人,巡航行驶速度也更加符合预期。
除了智驾能力的提升外,理想也重点介绍了其在安全性上的各种努力。在本次的 OTA 6.0 中,AD MAX 的安全性能也做出了显著提升。
在 2024 年上半年,理想汽车在人类驾驶条件下的里程安全事故率降低了 30%,有效帮助用户避免了 36 万起潜在事故的发生,同时误触发率保持在极低的水平,即每 30 万公里小于 1 次。
理想致力于为用户构建一个全场景的主动安全体系,全方位保障用户的出行安全。
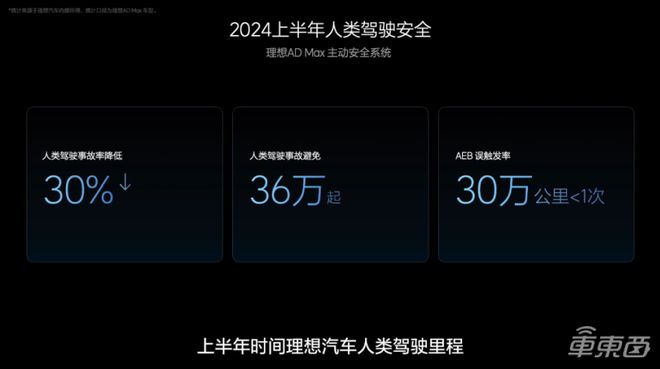
▲2024 年上半年理想 AD Max 主动安全系统成绩
在复杂路口,理想汽车的 AEB(自动紧急制动)系统能够全面覆盖行人、两轮车和三轮车等典型障碍物,无论它们从左、右或前方靠近,系统都能及时响应。
一旦这些障碍物进入理想汽车的安全警戒区域,AEB 系统将立即启动,帮助用户主动停车。即便是在盲区中突然出现的车辆,如果用户的车辆侵入了对方的安全空间,系统也会主动刹车以避免事故。
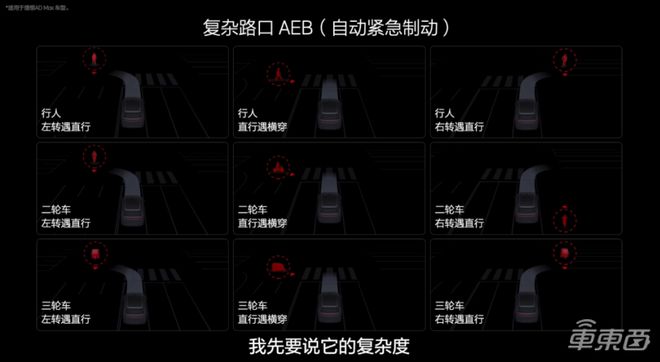
▲复杂路口 AEB 能力
夜间 AEB 功能在高速行驶中尤为关键,当周围几乎没有照明时,理想 AD Max 系统能够在极限情况下,如前方有一辆未开启灯且无反光条的静止货柜车,以 120 公里每小时的速度完全停稳车辆。
理想汽车还提供了全自动 AES(自动紧急转向)功能,以应对“消失的前车”这种极端场景。
在高速行驶中,当前车突然急刹,而用户的车辆与前车距离太近无法及时停下时,AES 系统将介入,使车辆减速并执行避让动作,从而极大地提升了安全性能。
此外,理想汽车还具备全方位低速 AEB 功能,适用于日常生活中的低速环境,尤其是在地库等停车环境复杂的情况下,能够有效避免柱子、墩子等障碍物,减少剐蹭事件,减轻用户的烦恼。
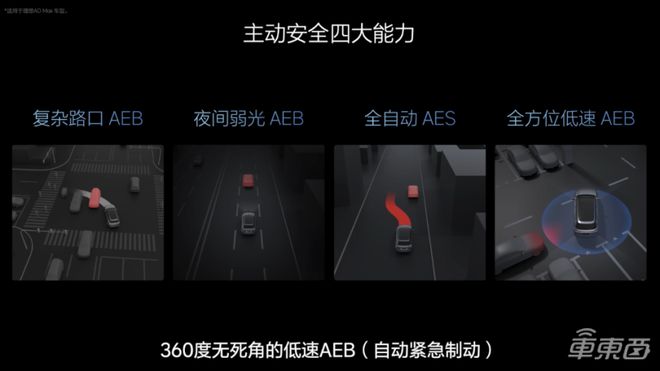
▲AD MAX 的 AEB 和 AES 能力
从具体场景出发来说,新版 AD MAX 在驾驶过程中,车辆与行人和骑行人的安全距离增大,窄车道与路沿的安全距离也得到了优化,整体行驶的安全性和舒适性显著提高。
施工通用占道障碍物的识别更加精准,绕行更及时,面对无灯小路口横穿车辆和骑行人,系统能够更早地发起避让和绕行。
此外,城市工况下的行驶效率也得到了提升。系统在面对复杂车流时的博弈变道能力显著增强,变道成功率大幅提升。路口规划路径和车道箭头使用策略的优化,提高了应对路口行人、骑车人和车辆的灵活性,导航变道的准确性也得到了提升。
二、首发 22 亿参数端侧智驾模型即日开始早鸟体验
在发布会的下半场,理想汽车的智能驾驶副总裁郎咸朋分享了公司在自动驾驶技术方面的重大突破。理想汽车发布了 22 亿参数量的端侧模型,并承诺将全量推送全端到端模型的 AD MAX 到用户。
▲无图 NOA 7 月内全量推送
在新一代智驾的实现层面,郎咸朋邀请了智能驾驶技术研发负责人贾鹏进行了讲解,这一核心框架与他 2024 年 3 月底在英伟达 GTC 2024 上讲的内容一致,即采用将人类驾驶员的驾驶方式与自动驾驶技术相结合的模式。
理想提出了两个核心概念:两颗 Orin-X 分别负责系统一和系统二。

▲4D One Model 端到端架构图
系统一类似于人类驾驶员在开车时的直觉和本能反应,运用端到端技术;而系统二则负责处理复杂、需要逻辑推理和决策的场景,运用 VLM 技术进行兜底和泛化。
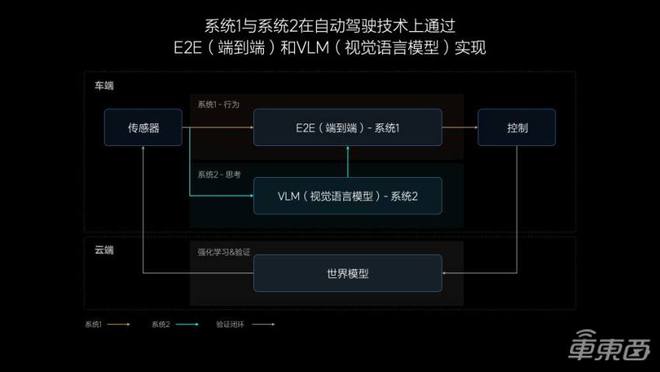
▲系统一和系统二模型
为了实现这种结合,理想汽车正在开发端到端技术和视觉语言模型(VLM)。
系统一运用端到端技术,直接将输入转化为输出,无需人工调试各种边缘情景。而系统二则运用 VLM,能够处理复杂场景和泛化问题,例如在无红绿灯的路口做出预判。

▲理想视觉语言模型(VLM)介绍
理想介绍道,“系统一”的进化经历了三个阶段,可以覆盖 95% 的绝大多数场景:
第一代:采用模块化设计的 NPN,包括感知、定位、规划、导航等多个模块,支持在全国 100 个城市推出城市 NOA 功能。
第二代:采用无图、分段式端到端设计,仅包含感知和规划两个模型。最大的变化是去除了 NPN,不再依赖先验信息,实现了全国范围内的适用性。
第三代:完全的端到端模型,采用单一模型结构,直接从传感器输入到行驶轨迹输出。
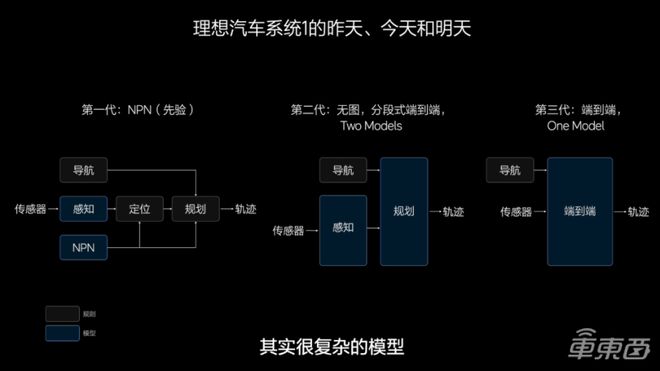
▲理想汽车“系统一”的三代演进
从实际效果出发,端到端技术对于场景理解是十分有帮助的。理想通过极端天气和复杂立交两个方向进行了解读,并将其端到端技术抽象为“通用障碍物的理解能力、超视距导航能力、道路结构理解能力、拟人的规划能力”四个主要能力。
95% 的场景都可以用系统一来解决,剩下的5% 则通过“系统二”的 VLM 进行处理。该算法架构基于一个统一的 Transformer 模型。
它将提示词文本通过分词器编码,并整合前视 120 度和 30 度相机的图像以及导航地图信息进行视觉编码。这些信息通过图文对齐模块进行模态对齐,然后由 VLM 模型进行自回归推理。
VLM 输出的结果包括对环境的理解、驾驶决策和驾驶轨迹,这些信息随后传递给系统一以控制车辆。
与大多数仅处理单帧图像的 VLM 模型不同,理想设计的流式视频编码器能够缓存更长时间的视觉信息序列,这对于需要在物理世界中运作的 AI 系统至关重要,代表了一种创新的架构。
同时,理想增加了 Memory bank(记忆模块),用于存储多帧历史信息,有效解决了在处理超长上下文时的推理延迟问题。
系统二不断分析当前的驾驶环境,构建了智能驾驶 Prompt 问题库并向系统一提供合理的驾驶建议。系统一可以根据不同场景调用相应的 Prompt 问题,主动向系统二求助,以便在特定场景下获得解决方案。
通过这些设计亮点,理想汽车不仅提升了自动驾驶系统的智能水平和响应速度,还增强了系统在面对复杂驾驶环境时的适应能力和决策质量。
理想同时提到,在上车验证前,他们面临的挑战包括获取高质量的数据和足够的算力支持端到端技术。为了验证这些技术的有效性,他们使用 Diffusion Transform 在模拟环境中构建小型世界模型,让车辆在其中进行测试。
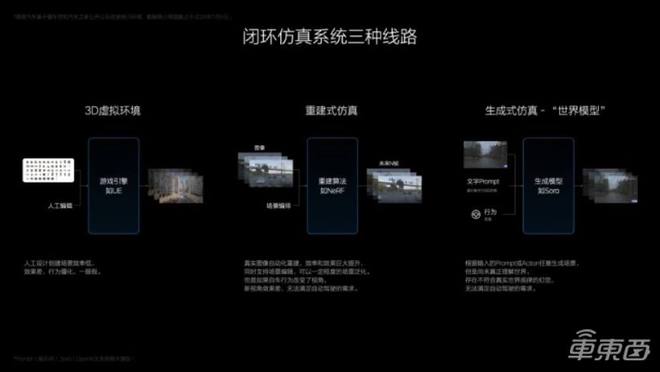
▲闭环仿真系统三种线路
理想汽车计划在自动驾驶系统中采用创新的“重建+生成”的世界模型测试方案。
这一方案首先通过 3DGS(3D 高斯溅射)技术对真实数据进行场景重建,然后利用生成模型补充新的视角,从而创建出既符合真实世界场景又能解决新视角模糊问题的环境。
此外,该系统的生成部分可以独立运行,通过结合 Layout(布局)先验、Reference(参考帧)图像和 Prompt(提示词),生成符合真实规律但未见过的全新场景。
在场景重建过程中,理想采取了动静态分离的核心策略:对静态环境进行重建,对动态物体则进行重建和新视角生成,从而创建出 360°的全新资产。将这两者结合,生成了一个可编辑和调整的 3D 物理世界,实现了场景的部分泛化。
生成模型相较于重建模型具有更好的泛化性。理想能够自定义地改变天气、时间、车流等条件,生成多样化的场景来测试模型的泛化能力,并评估自动驾驶系统在各种条件下的适应能力。
通过这种无限环境,理想可以对自动驾驶系统进行充分的学习和测试,确保用户获得一个高效、安全和舒适的自动驾驶体验。
在介绍完理想汽车在端到端技术的进展后,理想方面也为车主带来了“One More Thing”,即理想汽车的端到端 +VLM 大模型即将开始内测,尽早让用户进行早鸟体验。
三、华为小鹏蔚来奔向全国都能开理想能赶上吗?
目前,在“全国都能开”的道路上,不少玩家已经开跑。
今年 2 月,华为宣布 ADS 2.0 实现不区分城市、全国 99% 道路可用后,自动驾驶的竞争就进入了新阶段。
根据公开报道,截至 2024 年 6 月,华为 ADS 可用范围覆盖全国超过 40000+ 城乡镇,MPI 人工平均接管里程提升至 270km+,城市高架汇入汇出成功率提升至 99.2%。
而且,华为 ADS 智驾总里程超过 3.8 亿公里,云端学习训练算力达到 3.5E FLOPS。
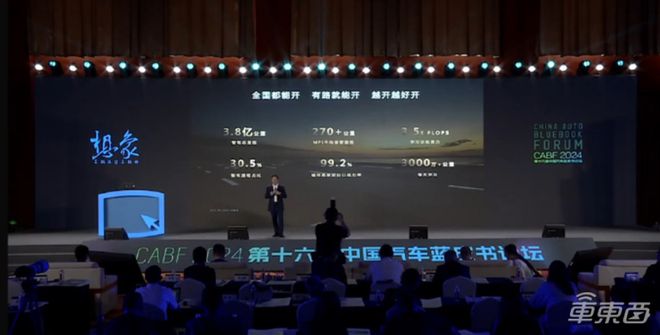
▲华为 ADS 智驾总里程超过 3.8 亿公里
同时,华为乾崑 ADS 3(参数丨图片).0 预计将于今年 8 月推出,该系统取消了 BEV 网络,全面切换到 GOD(通用障碍物识别)网络,对障碍物的识别能力和对场景的理解能力更强,体验更像人类。
近期,鸿蒙智行宣布华为乾崑 ADS 升级,新版本将支持智能泊车感知低矮障碍物、导航地图红绿灯倒计时等功能。
除了华为外,小鹏、蔚来等车企也在通往全国都能开的道路上取得了阶段性成果。
7 月 2 日,小鹏汽车宣布,截至目前 XNGP 城区智驾累计覆盖 356 城。全国都能开的无限 XNGP 即将在本月全量推送。
7 月 4 日,小鹏 XNGP 智驾 XOS 5.2.0 公测版本正式推送。小鹏官方表示,该版本搭载全国首个量产上车的端到端 AI 大模型,实现全国都好用,有路就能开。
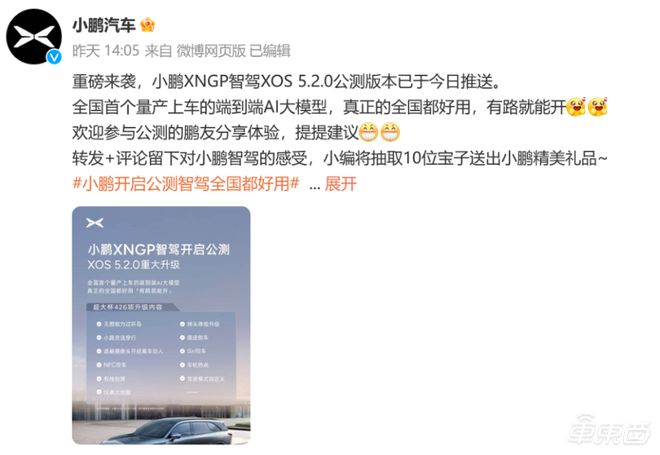
▲小鹏 XNGP 智驾 XOS 5.2.0 公测版本推送
而在今年 4 月份,蔚来也向 Banyan·榕智能系统用户全量推送了全域领航辅助 NOP+ 城区功能。
根据蔚来 6 月份智能驾驶运营报告,蔚来全域可用道路里程达 389.9 万公里,本月新增 249.9 万公里,其中城区道路可用总里程达 353.9 万公里,环比大幅度提升。此外,智能驾驶城区累计验证总里程已达 3.7 亿公里。
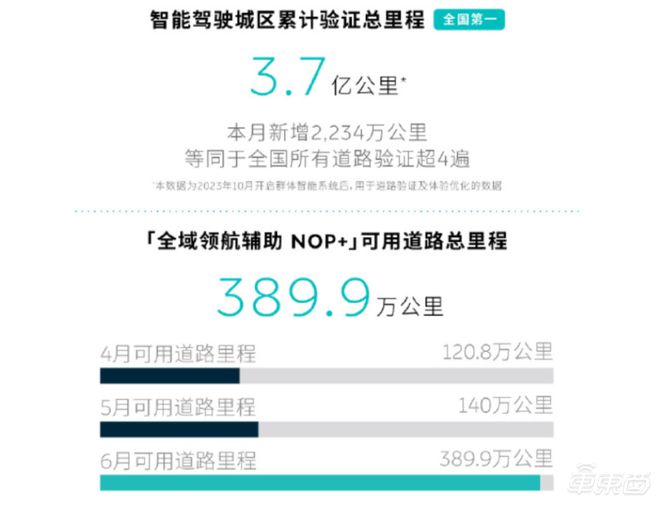
▲蔚来智能驾驶城区累计验证总里程已达 3.7 亿公里
整体上看,在全国都能开的智驾跑道上,不少行业玩家都吹响了冲锋的号角。
结语:理想冲锋智能驾驶
继 MEGA 发布不及预期,李想推迟下半年纯电新车计划后,理想汽车通过调整组织架构、发放购车权益、扩展超充站覆盖范围等措施,开展广泛而积极的自救。
6 月,理想卖车 4.78 万台,同比增长 46.7%,成为当月中国市场新势力销量冠军。
今年第二季度,理想交付 10.86 万辆,同比增长 25.5%。截至 2024 年 6 月 30 日,理想汽车累计交付量达到 82.2 万辆,位居中国新势力品牌总交付量第一。
可以说理想保住了销量基本盘,并且正在积极寻求新的第二增长曲线,而攻克智能驾驶就是理想汽车未来战略中的坚定落子。
不过,理想的智能驾驶到底能不能站上中国智驾第一梯队还有待检验,毕竟智能驾驶挑战者如云,在 2024 下半年,整个行业也将迎来一场智驾火拼。






