新智元报道
编辑:昕朋
如何让一个机器人尴尬?波士顿动力发布 Atlas 失误集锦,全网围观机器人翻车的各种样子!
上周,波士顿动力公司分享了一段仿人机器人 Atlas 变身「工地打工机器人」的视频。
视频中的 Atlas 活动自如。抬抬木板、搬搬砖什么的,都不在话下,还能愉快地转个圈。
轻松跳上台阶后,Atlas 转身起跳,顺利把一袋工具包稳稳地扔给脚手架上的建筑工人。
收工下班,Atlas 又高兴地来了个原地 360°后空翻。更神奇的是,在站稳后,它还会握拳给自己鼓励。
所谓「台上一分钟,台下十年功」。Atlas 的精湛表演,离不开一次又一次的训练。
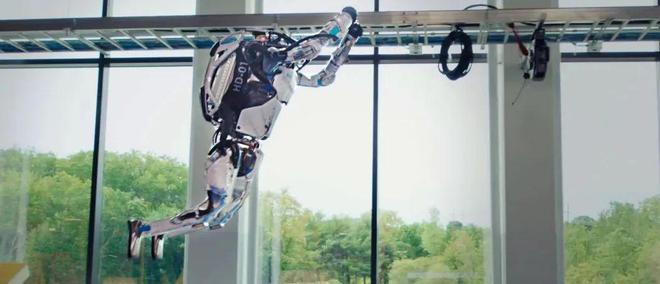
周五,波士顿动力发布了一个 Atlas 表演花絮,让我们看看这个机器人都有哪些「翻车」瞬间。
一个机器人的尴尬瞬间
视频中的场景与上周发布的视频类似。Atlas 的动作也与前者类似,只不过都是失误版本。它可能在向后滑行时被自己绊倒,然后摔个四脚朝天。

或者是过独木桥的时候一个脚滑,人仰马翻。
类似的翻车现场还有很多。有「人财两失」的:

有搬不动原地开摆的:

还有「以头抢地」的:

如果 Atlas 会说话,看到这个视频的它,一定会一个后空翻钻到地缝里吧。

逆袭的秘密
那么,Atlas 是如何成功逆袭的呢?
为了改进 Atlas 的表现,波士顿动力团队历时五年,对机器人进行多次迭代,不断提升 Atlas 的环境感知能力和适应能力。与此同时,Atlas 自主行动的能力也得到了增强。
要完成各种复杂的操作,首先得在运动中保持平衡。
最初的 Atlas 走路踉踉跄跄,行走过程中身体仍较为僵硬,在快要摔倒的时候无法调动全身,只会通过改变步伐来重新寻找平衡。
在研究人员的努力下,Atlas 像新生儿一样,逐渐学会挥动双臂来保持身体平衡。研究团队使用五次样条生成高级所需运动(例如摆动脚轨),将给定的脚步位置用作样条的结点。
波士顿动力的团队表示,机器人身体结构和人类有很大差别。例如,它没有脊椎和肩胛骨,手臂也较为脆弱。
因此,团队必须根据 Atlas 的尺寸和复杂性,对它的重量、强度、活动能力等要素进行权衡,并不断优化控制算法,从而更好地协调它的各种动作。
别看它是个 1 米 5 的大个儿,Atlas 在机器人界可谓身轻如燕。
为了保持机身灵活性,Atlas 利用 3D 打印来减轻重量和空间,从而形成具有高强度重量比和大工作空间的机器人。

波士顿动力的工程师 Aaron Saunders 说,
通过 3D 打印。我们能显著减少肢体惯性,这对于步行机器人来说是一件大事——系统中的大部分能量都用于在空中摆动沉重的双腿。
此外,Atlas 还能够通过立体视觉、距离感应和其他传感器自主或通过远程操作感知障碍物并穿越崎岖地形。研究团队为 Atlas 提供了一张高级地图,其中大致描述了它的行动路线和相应位置应该做出的动作。
Atlas 利用这些信息为自己导航,并感知周围环境,根据感知到的实时数据,自主规划整个行动,以完成各项任务。
Atlas 执行的每个动作都源自其行为库中的动作模板,它可以根据目标情况自主从库中选择相应的动作执行。
同时,Atlas 的模型预测控制器(MPC)会调整其发力、姿势、动作发生时机等细节,来应对环境、脚滑等各种可能实时出现的因素。
并且,MPC 还允许 Atlas 跨行为边界预测下一步的行动,比如它知道了这次跳跃后是一个后空翻后,就可以自动地创建从一个行为到下一个行为的过渡,使每一步动作都自然地连贯起来。
五年的迭代,Atlas 从踉踉跄跄到轻松后空翻,像是完成了人类四分之一的旅程。
相信看到它如此完美的表现,波士顿动力的「老父亲们」,也会像完成后空翻的 Atlas 一样,振臂高呼吧。
参考资料:






